February 24, 2026
Autonomous driving systems: human assistance or complete system autonomy
Autonomous driving is regarded as a key technology for the mobility and logistics of the future. However, not every autonomous vehicle works according to the same principle. It is particularly important to differentiate between supervised autonomous driving and non-supervised autonomous driving. Both approaches pursue different strategies and each has its own strengths and challenges.
The key question for companies, cities and logistics providers is therefore: which model is realistic and economically viable today?
What does supervised autonomous driving mean?
In supervised autonomous driving, vehicles drive independently on the road but are constantly monitored from a distance. A person does not sit in the vehicle, but in a control center and only intervenes when the system reaches its limits.
This monitoring is carried out via cameras, sensors and a permanent data connection. The operator can look after several vehicles at the same time. Interventions are rarely necessary, but increase safety and enable the use of autonomous vehicles even in complex traffic situations.
A well-known example of this approach is the US company Faction Technology from Silicon Valley. Faction combines compact electric delivery vehicles with autonomous driving software and permanent remote monitoring. The vehicles drive autonomously, but can be remotely controlled or released at short notice if necessary.
The great advantage of this model lies in its high practical relevance. Vehicles do not have to cope with every conceivable traffic situation completely independently, as a human can intervene in the background to provide support. This means that autonomous systems can be brought into real-world use much faster, more cost-efficiently and more easily from a regulatory perspective.
Basically, the principle works like an air traffic controller in the tower: he monitors the traffic from a distance and only intervenes when necessary.
What does unsupervised autonomous driving mean?
Unsupervised autonomous driving refers to vehicles that drive completely without human supervision or assistance. There is no control center, no operator and no possibility of external intervention. The vehicle must independently recognize, assess and safely manage every traffic situation.
This model is often associated with robotaxis or fully autonomous vehicle fleets. One well-known example is Waymo. The company operates vehicles that travel without a driver on board and are designed to function permanently without direct human supervision.
The technological demands of this approach are correspondingly high. The system must also reliably master rare, complex and unpredictable situations. At the same time, the regulatory requirements are much stricter, as no human can intervene directly in an emergency.
Added to this is the considerable technical complexity: sensors, computing power and redundant systems not only drive up costs, but also energy requirements. The high power consumption in turn has an impact on efficiency and range and inevitably leads to conflicting objectives in the vehicle concept.
Key differences between supervised and non-supervised autonomous driving
The most important difference lies in the role of the human driver. In supervised autonomous driving, the human remains part of the system, but no longer in the vehicle. In non-supervised autonomous driving, the human is completely removed from the driving process.
The models also differ significantly in economic terms. Supervised autonomous systems can be operated with less technical complexity, as they do not have to solve every exceptional situation fully automatically. This significantly reduces development and operating costs.
Non-supervised autonomous vehicles require extremely sophisticated sensor technology, software and protection. This makes them expensive and currently only realistic in very limited areas of application.
Another difference is the time to market. Supervised autonomous vehicles can be gradually integrated into existing traffic and delivery concepts. Non-supervised systems usually require completely new framework conditions and are therefore slower to scale.
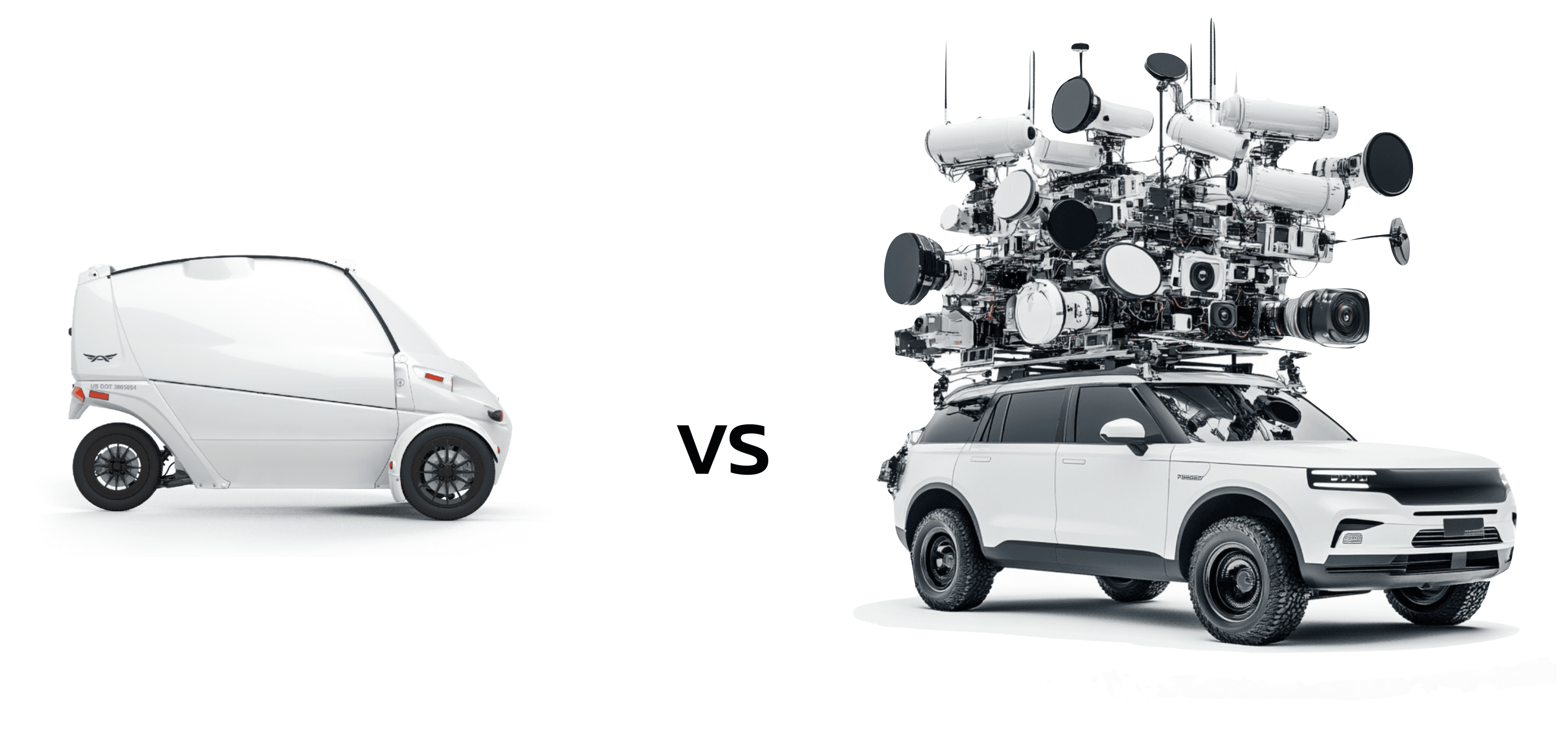
Example comparison of Faction and Waymo
Faction deliberately focuses on supervised autonomous driving. The vehicles are compact, electric and specialized in logistics tasks. Remote monitoring enables safe operation even in mixed traffic and simultaneously reduces the costs per vehicle. This model is particularly suitable for urban delivery services and the last mile.
Waymo pursues the approach of non-supervised autonomous driving. The vehicles are designed to drive completely autonomously and do not require permanent human assistance. This model is technologically impressive, but is currently limited to clearly defined areas and very controlled environments.
Both approaches are justified, but pursue different goals. While Waymo is focusing on complete autonomy in the long term, Faction is focusing on a solution that can be implemented economically in the short term.
Why supervised autonomous driving is currently preferred
Supervised autonomous driving is currently considered the more realistic option for many applications. It enables the use of autonomous vehicles today without having to wait for a fully mature technology.
This model offers clear advantages in terms of safety, costs and scalability, particularly in logistics, urban delivery traffic and commercial applications. Acceptance by authorities and the public is also higher, as a human contact person is available at all times.
Significance for ARI Motors and electromobility
Supervised autonomous driving is particularly relevant for ARI Motors as a provider of affordable electric commercial vehicles. The combination of affordable electric vehicles and supervised autonomous driving technology creates a realistic prospect for autonomous delivery solutions in the European market.
Through partnerships with technology providers such as Faction, ARI Motors can meaningfully combine electromobility, economy and autonomy and thus open up new fields of application for compact electric commercial vehicles.
Conclusion
The difference between supervised and non-supervised autonomous driving is crucial for the practical implementation of autonomous mobility. While non-supervised systems pursue the long-term goal of complete autonomy, supervised autonomous driving already offers a safe, economical and scalable approach today.
Supervised autonomous driving is currently considered the more pragmatic approach, especially for logistics and urban mobility. It combines technological innovation with human control and enables companies such as ARI Motors to put autonomous electromobility into practice today.







